Tensor Analysis (2) General Bases and Tensor Notation
Abstract. 我们常常需要分量式(Component)以便于计算。为了兼容任意的坐标系,我们需要引入 General Bases,并推导向量和张量的坐标表示和坐标变换。
- General Bases
- The Jacobian of a Basis Is Nonzero
- The Summation Convention
- Computing the Dot Product in a General Basis
- Reciprocal Base Vectors
- The Roof (Contravariant) and Cellar (Covariant) Components of a Vector
- Simplification of the Component Form of the Dot Product in a General Basis
- Computing the Cross Product in a General Basis
- A Second Order Tensor Has Four Sets of Components in General
- Change of Basis
General Bases
考虑取 $\mathbb{R}^3$ 中的一组基 $\mathbf{g}_1, \mathbf{g}_2, \mathbf{g_3}$,则任意一个向量可以被唯一表出。
$$
\mathbf{v} = \sum_{i=1}^3 v^i\mathbf{g_i}
$$
注意这里的 $i$ 在上标和下标位置上都表示编号而不是乘方,这个记号是一个伏笔。
The Jacobian of a Basis Is Nonzero
Definition 2.1.(Jacobian Matrix) $G = (\mathbf{g}_1^T, \mathbf{g}_2^T, \mathbf{g_3}^T)$。
Definition 2.2.(Jacobian) $J = \mathrm{det~}G$。
根据线性代数我们知道如果 $\mathbf{g}_1, \mathbf{g}_2, \mathbf{g}_3$ 线性无关,必有 $J\ne 0$。
The Summation Convention
由于我们的讨论都是 $\mathbb{R}^3$ 下的,所以求和指标是确定的。而且求和中的 $i$ 是一个 dummy variable。简便起见并且不丢失任何信息地,我们可以约定:去掉求和符号,用下面的方法来表示分解式
$$
\mathbf{v} = v_i\mathbf{g}^i
$$
这个记号表示分解式当且仅当两个相同的 dummy index 一个是上标,一个是下标。举例来说 $v^iv_i = \sum_i v^iv_i$,而 $v^iv^i$ 可能是 $v^1v^1, v^2v^2$ 或者 $v^3v^3$。
这个约定是爱因斯坦提出的,称为爱因斯坦求和约定。这个约定现在看起来非常奇怪,但是到第六节之后它的简便性就会有所体现。
Computing the Dot Product in a General Basis
很明显在任意基下面我们就不能用原来对位相乘的方法来计算点积。正确的表达式是
$$
\mathbf{u}\cdot\mathbf{v} = u^iv^j\mathbf{g}_i\cdot\mathbf{g}_j
$$
这个是一个九项的式子,为了让它更简单我们引入 reciprocal base vectors。
Reciprocal Base Vectors
先考虑二维的情形,现在要计算 $\mathbf{u}\cdot\mathbf{v}$,我们将 $u$ 分解为 $\mathbf{u} = u^1\mathbf{g}_1 + u^2\mathbf{g}_2$。
现在我们找一组新的基 $\mathbf{g}^1, \mathbf{g}^2$,将 $\mathbf{v}$ 用这两个向量表出,然后写出乘积式。
$$
\begin{aligned}
\mathbf{u}\cdot\mathbf{v} &= (u^1\mathbf{g}_1 + u^2\mathbf{g}_2)(v_1\mathbf{g}^2 + v_2\mathbf{g^2}) \\
&= u^1v_1\mathbf{g}_1\mathbf{g}^1+u^1v_2\mathbf{g}_1\mathbf{g}^2+u^2v_1\mathbf{g}_2\mathbf{g}^1+u^2v_2\mathbf{g}_2\mathbf{g}^2
\end{aligned}
$$
我们希望这个式子保持原来对点相乘的简单形式,也就是要求
$$
g_ig^i = 1, g^ig^j = 0 (i\ne j)
$$
事实上这时候,从几何上已经非常容易理解了,如下图所示我们可以找到 reciprocal base vector
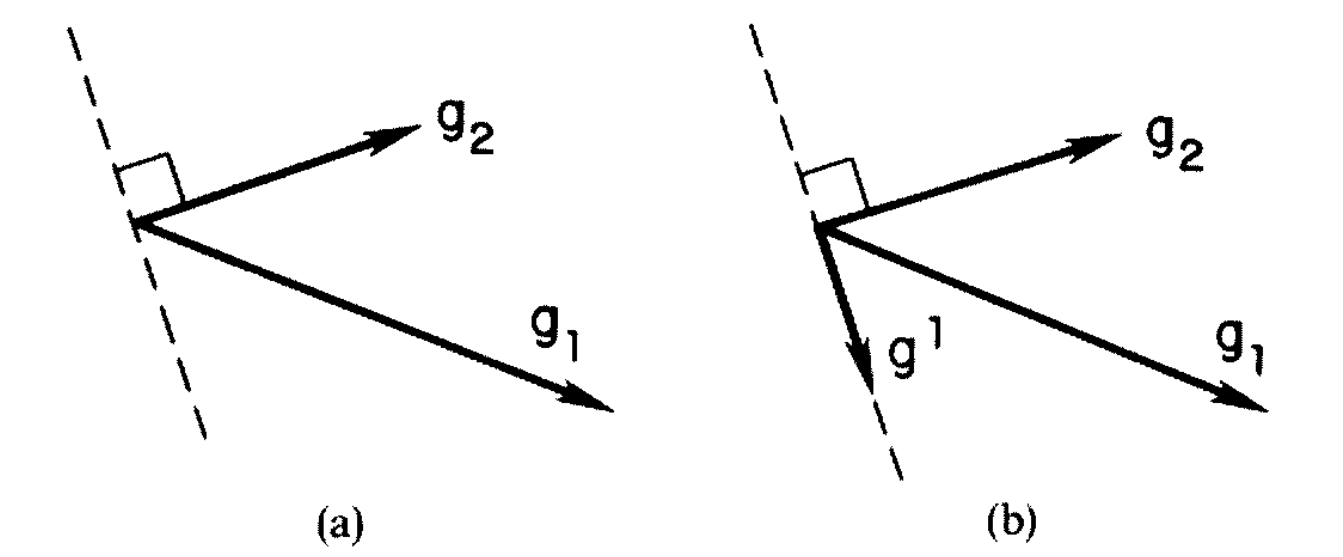
但是我们还希望有一个代数上的方法。
首先写出 $\mathbf{g}_1, \mathbf{g}_2, \mathbf{g}_3$ 的 Jacobian Matrix $G_1$ 和 $\mathbf{g}^1, \mathbf{g}^2, \mathbf{g}^3$ 的 Jacobian Matrix $G_2$。
拓展并翻译上面的条件,就是
$$
\mathbf{g}_i (\mathbf{g}^i)^T = \delta_i^j
$$
其中 $\delta_{ij}$ 是 Kronecker delta 函数,满足
$$
\delta_i^j = [i = j]
$$
换言之
$$
G_1G_2^T = I
$$
也就是
$$
G_2 = (G_1^{-1})^T
$$
The Roof (Contravariant) and Cellar (Covariant) Components of a Vector
翻译是逆变分量 (Contravariant Component)和协变分量(Covariant Component)。这个名字的意义暂时不是很明确,方便起见我们下文均采用 Roof Component 和 Cellar Component 的说法。
也就是上面的在 $\mathbf{g}_i$ 和 $\mathbf{g}^i$ 下的分解。你可以这样记忆,Roof 是指 $v^i\mathbf{g_i}$ 中 $v^i$ 是上标(Roof)。而且由于某些巧合,这里的 Roof 和 Cellar 和矩阵的 Row 和 Column 是联系的。
推导 Cellar Components 可以采用如下方法。
$$
(v_i\mathbf{g}^i)\cdot \mathbf{g}_j = v\cdot\mathbf{g}_j
$$
将左式展开
$$
\begin{aligned}
\mathrm{LHS} &= v_i\mathbf{g}^i\cdot\mathbf{g}_j \\
&= v_i\delta_j^i \\
&= v_j
\end{aligned}
$$
因此
$$
v_i = \mathbf{v}\cdot\mathbf{g}_i \tag{1}
$$
可以用同样的方法推出
$$
v^j = \mathbf{v}\cdot\mathbf{g}^j \tag{2}
$$
这个推导方法和我们熟知的反演非常相似。
这也启发我们 kronecker delta 函数可以视为一种 replacement operator(换位算符)。形式化地
$$
v^i\delta_i^j = v^j
$$
Simplification of the Component Form of the Dot Product in a General Basis
根据上文的铺垫我们容易进行以下推导
$$
\begin{aligned}
\mathbf{u}\cdot\mathbf{v} &= u^iv_j\mathbf{g}_i\cdot\mathbf{g}^j \\
&= u^iv_j\delta_i^j \\
&= u^iv_i
\end{aligned}
$$
当然你一开始如果将 $\mathbf{u}$ 分解为 Cellar Components,那么也可以写成
$$
\mathbf{u}\cdot\mathbf{v} = u_iv^i
$$
Computing the Cross Product in a General Basis
现考虑如何求解 $\mathbf{u}\times\mathbf{v}$ 在 General Basis 下面的分解式,不妨求解它的 Cellar Components。
$$
\mathbf{u}\times\mathbf{v} = (\mathbf{u}\times\mathbf{v})_k\mathbf{g}^k
$$
对于 $(\mathbf{u}\times\mathbf{v})_k$,将 $\mathbf{u}, \mathbf{v}$ 分解为 Roof Components,然后利用上一节的结论
$$
\begin{aligned}
(\mathbf{u}\times\mathbf{v})_k &= ((u^i\mathbf{g}_i)\times(v^j\mathbf{g}_j))\cdot \mathbf{g}_k \\
&= u^iv^j(\mathbf{g}_i\times\mathbf{g}_j)\cdot\mathbf{g}_k
\end{aligned}
$$
后面的混合积我们是熟悉的,如果 $i, j, k$ 两两不同,那么得到的东西是 $\pm J$(J 是 $\mathbf{g}_1, \mathbf{g}_2, \mathbf{g}_3$ Jacobian),否则为 $0$。这里我们引入 Levi-Civita 记号,其中
$$
\epsilon_{ijk} = \begin{cases}
J, & i, j, k \text{ is an even permutation of } (1, 2, 3) \\
-J, & i, j, k \text{ is an odd permutation of } (1, 2, 3) \\
0, & \text{otherwise}
\end{cases}
$$
然后叉乘可以改写成
$$
\mathbf{u}\times\mathbf{v} = \epsilon_{ijk}u^iv^j\mathbf{g}^k
$$
接下来,如果需要 $\mathbf{u}\times\mathbf{v}$ 的 Roof Component,这个推导和上面的过程是高度相似的,只是现在混合积变成了 $\mathbf{g}^1, \mathbf{g}^2, \mathbf{g^3}$ 的 Jacobian,根据 Reciprocal Base Vectors 的关系,可以知道此时的 Jacobian 是 $J^{-1}$,因此 Levi-Civita 记号需要相应改写为
$$
\epsilon^{ijk} = \begin{cases}
J^{-1}, & i, j, k \text{ is an even permutation of } (1, 2, 3) \\
-J^{-1}, & i, j, k \text{ is an odd permutation of } (1, 2, 3) \\
0, & \text{otherwise}
\end{cases}
$$
叉乘可以写作
$$
\mathbf{u}\times\mathbf{v} = \epsilon^{ijk}u_iv_j\mathbf{g}_k
$$
显而易见
$$
\epsilon_{ijk} = J^2\epsilon^{ijk}
$$
Hint. $\epsilon_{ijk}$ 和 $\epsilon^{ijk}$ 又称为 Permutation Tensor 的 Cellar Component 和 Roof Component(【Fixme:Exercise 2.13】)
Proposition 1.
$$
\epsilon^{ijk}\epsilon_{pqr} = \left\vert\begin{matrix}
\delta^i_p & \delta^i_q & \delta^i_r \\
\delta^j_p & \delta^j_q & \delta^j_r \\
\delta^k_p & \delta^k_q & \delta^k_r
\end{matrix}\right\vert
$$
Proof. 只需要验证 $ijk$ 和 $pqr$ 均取 123 的情形,其余情况或者平凡或者可以对称得到。$\square$
Corollary 1.
$$
\epsilon^{ijk}\epsilon_{pqk} = \delta_p^i\delta_q^j - \delta_q^i\delta_p^j
$$
A Second Order Tensor Has Four Sets of Components in General
接下来我们考虑二阶张量在 General Bases 下的分量。
首先我们可以将作用的向量分解为 Roof Component,此时我们需要知道
$$
\mathbf{T}g_j = \mathbf{T}_j
$$
然后对得到的东西分解为 Cellar Component,此时我们需要知道
$$
T_{ij}\mathbf{g}^i = \mathbf{T}_j
$$
套用式 $(6.1)$,得到
$$
T_{ij} = \mathbf{g}_i\cdot\mathbf{Tg}_j
$$
然后我们试图将上面的式子写成此前定义的直积的形式。
$$
\begin{aligned}
\mathbf{Tv} &= \mathbf{T}(v^j\mathbf{g}_j) \\
&= v^j\mathbf{T}\mathbf{g}_j \\
&= v^j\mathbf{T}_j \\
&= v^jT_{ij}\mathbf{g}^i \\
&= T_{ij}(\mathbf{g}^j\cdot v)\mathbf{g}^i \\
&= T_{ij}\mathbf{g}^i\mathbf{g}^j(\mathbf{v})
\end{aligned}
$$
换言之
$$
\mathbf{T} = T_{ij}\mathbf{g}^i\mathbf{g}^j
$$
这称为 $\mathbf{T}$ 的 Cellar Component。
类似于我们之前的提取思路,我们将基全部换成对应的 reciprocal base vector,可以得到
$$
T^{ij} = \mathbf{g}^i\cdot\mathbf{Tg}^j, \qquad \mathbf{T} = T^{ij}\mathbf{g}_i\mathbf{g}_j
$$
这称为 $\mathbf{T}$ 的 Roof Component。
可以想象还有两个 Mixed Component。
$$
T^i_{\cdot j} = g^i\cdot\mathbf{Tg}_j, T^{\cdot i}_j = \mathbf{g}_j\mathbf{Tg}^i
$$
一般地 $T^i_{\cdot j}\ne T^{\cdot i}_j$。同理可以证明
$$
\mathbf{T} = T^i_{\cdot j}\mathbf{g}_i\mathbf{g}^j = T^{\cdot i}_j\mathbf{g}^j\mathbf{g}_i
$$
如果 $\mathbf{T}$ 是对称的,那么有
$$
\begin{aligned}
T_{ij} &= \mathbf{g}_i\cdot\mathbf{Tg} &\\
&= \mathbf{g}_j\cdot\mathbf{T}^T\mathbf{g}_i & (\text{Definition of } \mathbf{T}^T) \\
&= \mathbf{g}_j\cdot\mathbf{T}\mathbf{g}_i & (\mathbf{T}\text{ is Symmetric}) \\
&=T_{ji}
\end{aligned}
$$
这表明矩阵 $(T_{ij})$ 也是对称的,类似地 $(T^{ij})$ 也是对称的,但是两个 Mixed Component 的矩阵则未必是对称的。你会发现这里存在某种交叉相等的关系。
Change of Basis
在给定的参考系下,向量和张量都不依赖于坐标系的选取,换言之他们都是 geometric invariant。当我们选取的基底变化时,变化的是他们的分量式而不是其本身。
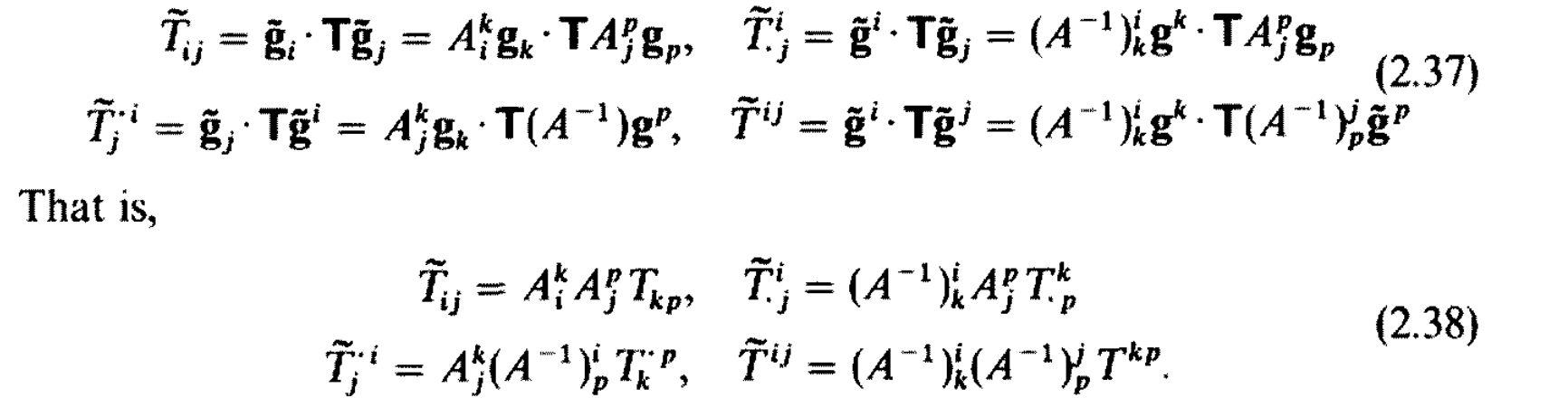
下面我们希望推导坐标变换时张量的 component 的表示。
考虑一组新的基 $\widetilde{\mathbf{g}}_i$,它和 $\mathbf{g}_i$ 的关系如下
$$
\widetilde{\mathbf{g}}_i = A_i^j\mathbf{g}_j
$$
或者用矩阵的形式表示(这里基底都写成列向量,$A_i^j$ 是 $A$ 的第 $i$ 列第 $j$ 行)
$$
\widetilde{G} = GA
$$
由于 $G, \widetilde{G}$ 都可逆(它们的列向量都是基),$A$ 也可逆,因此
$$
G = \widetilde{G}A^{-1}
$$
或者写成分量的形式
$$
\mathbf{g}_i = (A^{-1})_i^j\widetilde{\mathbf{g}}_j
$$
将两边求逆,还可以得到
$$
\begin{aligned}
&\widetilde{G}^{-1} = A^{-1}G^{-1}, & &\mathbf{\widetilde{g}}^i = (A^{-1})_j^i\mathbf{g}^j \\
&G^{-1} = A\widetilde{G}^{-1}, & &\mathbf{g}^i = A_j^i\widetilde{\mathbf{g}}^j
\end{aligned}
$$
以及坐标变换后向量的坐标表示
$$
\widetilde{v}_i = \widetilde{\mathbf{g}}_i\cdot\mathbf{v} = A_i^j\mathbf{g}_j\cdot \mathbf{v} = A_i^jv_j
$$
上面的结果经过一些琐碎的推导也可以得到张量的坐标变换公式